RUNNING NAKED
 [11/28/2004]
[11/28/2004]
The batteries finally finished charging, so I rushed out to test drive the robot. I could tell
instantly that it was am improvement by how quickly it responded. However, it kept getting hung
up on the carport surface. I have to get the wheel height adjusted properly - something still
isn't quite right. The smaller wheels makes this adjustment difficult, as they can only descend
so far. I wound up taking off all the armor and running it around that way. Oh, man,
what a difference! 19.2V on fully-charged NiMH batteries was just what the doctor ordered!
This thing is SWEET!!! Swift, fast, maneuverable. I still need to tweak the controls a little,
but I determined that setting the dual rates down on the aileron control on the transmitter got
me in the ballpark of where it needs to be for positive control.
Look out! Here I come!
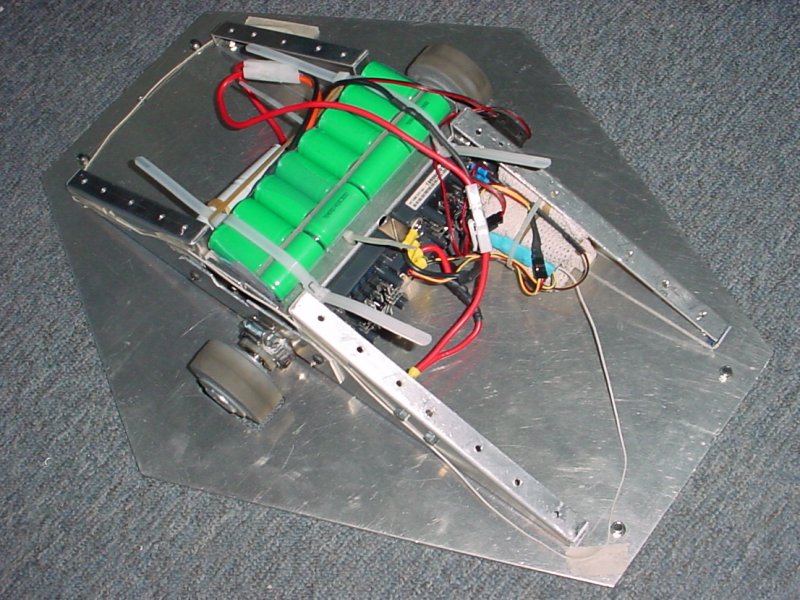
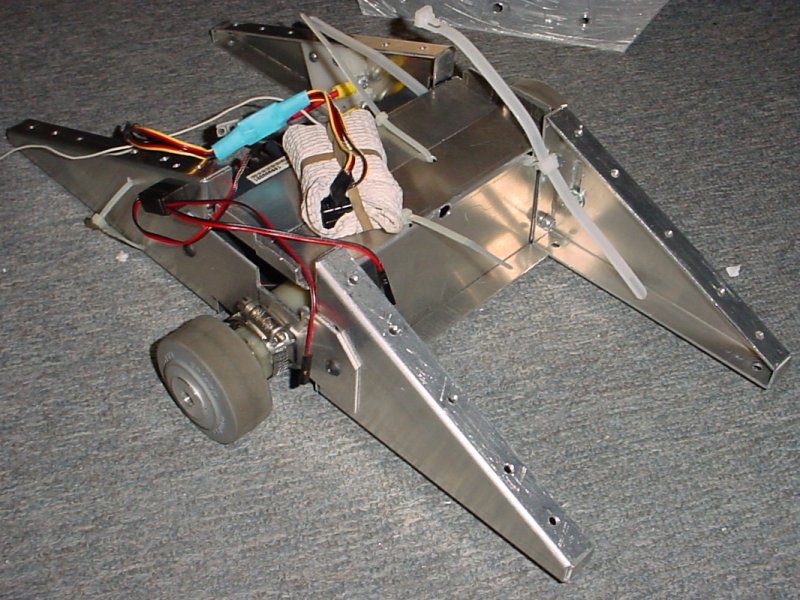 Since a complete disassembly seemed eminent, I decided I may as well begin the process. But
while in the process, I realized that perhaps I didn't have to completely disassemble
the robot - perhaps I could just remove the base plate. So that is what I did. Now the robot
is really naked. I needed to do this to be able to get in with a drill to drill some
holes so I could add some zip ties to secure the additional batteries. I will also need to get
to the wheel height adjustment bolts, as I need to either modify the whole mechanism, or extend
one of the slots to allow the right motor to come right down to the base plate. The left motor
comes down OK, but the right motor is impeded. And I don't know if it is because of the wires
running beneath it, or because the slot is not long enough. But that is what this dissection
is about...to fix this.
Since a complete disassembly seemed eminent, I decided I may as well begin the process. But
while in the process, I realized that perhaps I didn't have to completely disassemble
the robot - perhaps I could just remove the base plate. So that is what I did. Now the robot
is really naked. I needed to do this to be able to get in with a drill to drill some
holes so I could add some zip ties to secure the additional batteries. I will also need to get
to the wheel height adjustment bolts, as I need to either modify the whole mechanism, or extend
one of the slots to allow the right motor to come right down to the base plate. The left motor
comes down OK, but the right motor is impeded. And I don't know if it is because of the wires
running beneath it, or because the slot is not long enough. But that is what this dissection
is about...to fix this.
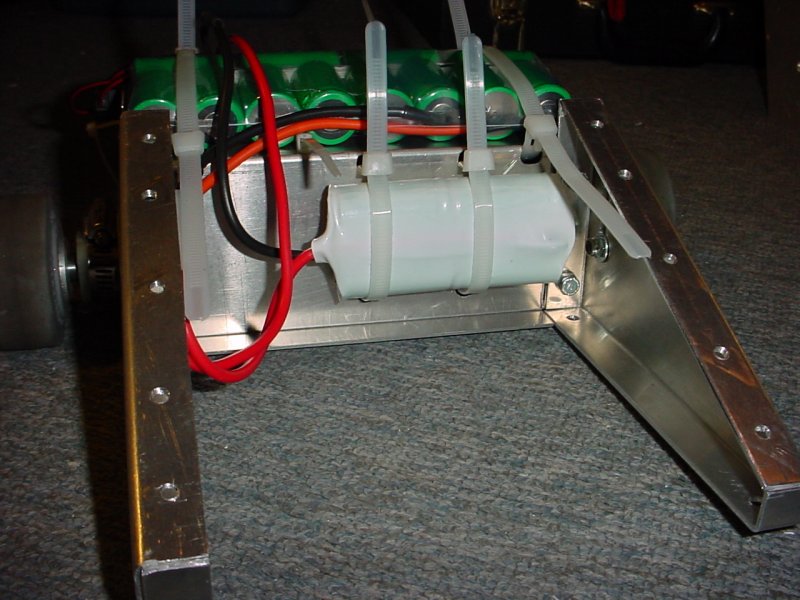 I got the holes drilled for the zip ties for the extra batteries. You can see them mounted in
this image (it's that white blob in the middle). When I made the extra pack, I realized the
clear heat shrink I used for the main pack was too wide for the new pack. I realized that too
late, so I lost some heat shrink. Fortunately, I still had some smaller white heat shrink tubing
left, so I was able to complete the job. Now the batteries are secure, but the robot is
vulnerable. Man, I can't wait until this thing is done. It is amazing just how much work goes
into making these things!
I got the holes drilled for the zip ties for the extra batteries. You can see them mounted in
this image (it's that white blob in the middle). When I made the extra pack, I realized the
clear heat shrink I used for the main pack was too wide for the new pack. I realized that too
late, so I lost some heat shrink. Fortunately, I still had some smaller white heat shrink tubing
left, so I was able to complete the job. Now the batteries are secure, but the robot is
vulnerable. Man, I can't wait until this thing is done. It is amazing just how much work goes
into making these things!
I did a search on robot names last night and discovered there is a middleweight(?) robot out there named Slap Happy. So, the name is definitely going to change.
I have added a few more potential new names to the list for my robot:
- Rock 'em Sock 'em (would be appropriate with the weapon)
- Runneth Under
- Uprooter
- Shear Surprise
- Monument of Death (Headstone? Brick of Tomb?)
- Undercut
- Tangent
- Tangential Deflection
- Vector Deflector
- Undermined Intent
- ACME Bot Launcher
- Undertow (or Under Toe)
- Death by Geometry